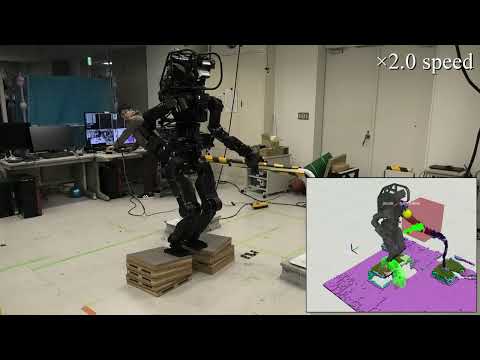
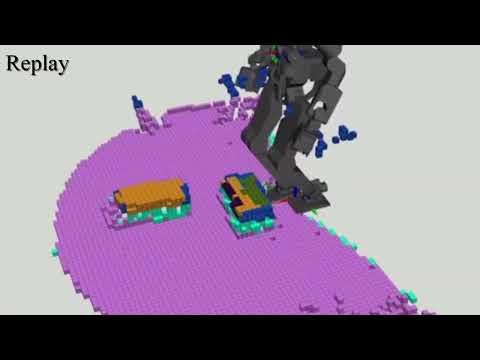
Torque-controlled Centroidal Dynamics QP-MPC
3D Vision Recognition and Online Motion Planning
地震被災地、放射能汚染領域、途上国、月面など、地図なし・通信不安定な状況下でも自律活動を可能とするため、AI搭載型ロボットの研究・開発を人生の目標としています。
研究の最大の特徴は、徹底的な高速化によって3D視覚センシングと動作計画を同時並列で行っている事です。
これにより、ドローンや外部固定カメラでの事前地形スキャンを必要とせず、ロボットが単身で未知環境へ突入できます。
My robot can autonomously move with mapping and online motion planning, for radiation environments, under-developing area, or Lunar.
The epic feature of my researches is simultanious 3D recognition and motion planning. Everything works online.
By thoroughly speeding up all processes, my humanoid robot system is able to navigate unknown environments by itself, without any pre-scanning by aerial drones or external cameras.



学歴
- 2009年4月 - 2015年3月 私立 大阪明星学園中学・高等学校
- 2015年3月 - 2019年3月 国立 大阪大学 基礎工学部 システム科学科
- 2019年4月 - 2021年3月 国立 大阪大学大学院 基礎工学研究科 システム創生専攻 修士(工学)(指導:原田研介教授)
- 2021年4月 - 2024年3月 国立 大阪大学大学院 基礎工学研究科 システム創生専攻 博士(工学)(指導:原田研介教授)
経歴
- 2019年10月 - 2024年3月 独立行政法人 産総研 情報・人間工学領域 AIST-CNRS Joint Robotics Lab.(JRL)
- 2022年4月 - 2024年3月 日本学術振興会(JSPS) 特別研究員 DC2
- 2024年4月 - トヨタ自動車株式会社 未来創生センター
研究成果
- 脚トルク制御とCentroidal Dynamics MPCに基づくヒューマノイドロボットの運動制御 (ロボティクス・メカトロニクス講演会2025)
- Online Object Searching by a Humanoid Robot in an Unknown Environment
- Online Multi-Contact Motion Replanning for Humanoid Robots with Semantic 3D Voxel Mapping: ExOctomap
- その他学会での口頭発表・受賞歴複数
Educational Background
- 2009.Apr - 2015.Mar Osaka Meisei Gakuen (Middle) High School, Osaka, Japan
- 2015.Apr - 2019.Mar School of Engineering Science, Osaka University, Japan
- 2019.Apr - 2021.Mar Master course in Graduate School of Engineering Science, Osaka University, Japan (Kensuke Harada Laboratory)
- 2021.Apr - 2024.Mar Ph.D. course in Graduate School of Engineering Science, Osaka University, Japan (Kensuke Harada Laboratory)
Career
- 2019.Oct - 2024.Mar AIST-CNRS Joint Robotics Lab., AIST, Japan
- 2022.Apr - 2024.Mar JSPS Young Fellow DC2
- 2024.Apr - Toyota Motor Coop. Frontier Research Center